
Junior-Year course in advanced systems engineering (feedback control )

E102 – Advanced Systems Engineering II is a junior-level course that’s part of of HMC’s engineering curriculum.
The course course covers LTI system transfer functions, Laplace/Z transforms, feedback control systems, modern state space methods, stability, etc.

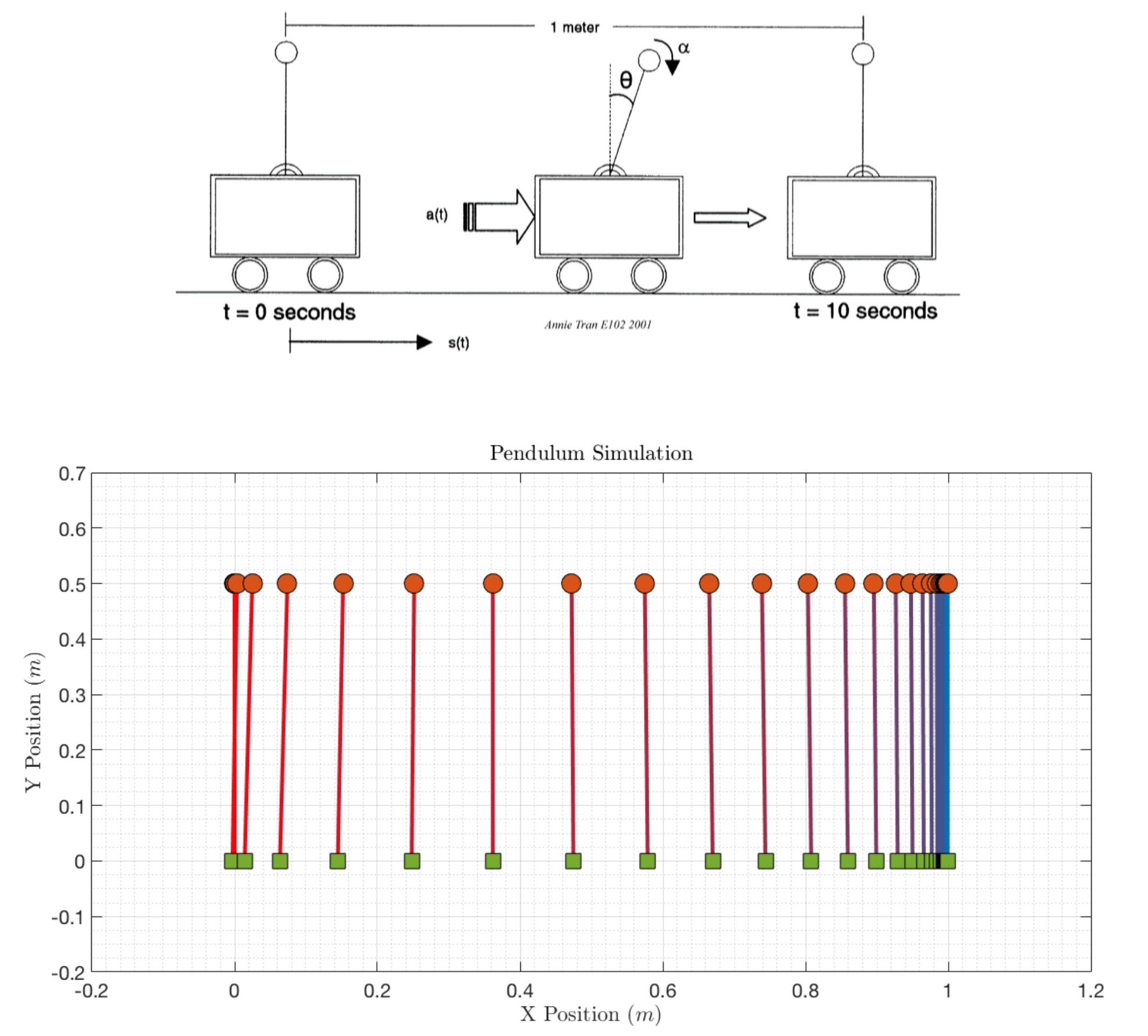
For our final project, I conducted a feedback control simulation study for an inverted pendulum on a cart, a.k.a. the ‘pencartulum’. Given some position and angular offset, the goal was to drive it to the origin, within minimum-time, offshoot, and acceleration constraints.
You can check out the final report below.